“ExcelによるPID制御のチューニング(3)設定値変更データを用いる方法(1)”で紹介した方法について、今回は具体的なExcelにより計算を紹介します。今回は、微分先行PID制御(PI-D制御)です。
尚、”ExcelによるPID制御のチューニング(3)設定値変更データを用いる方法(1)”では、PV値の参照モデルとの一致を評価してP,I,Dパラメータの最適化を行う方法と紹介しましたが、OP値の変動も最適化の目的関数に含めて紹介します。
この方法は、下記の資料を参考にしています。
加納,小河,田坂,高橋,滝波,吉井,大寶,増田:モデル不要PID調整法E-FRITの開発と実用化,計測と制御,50–12,1076/1079 (2011)
小河 守正;化学工学,85,115-118 (2021)
1.チューニングの手順
チューニングの手順は次の通りになります。
- 設定値変更データの入手
\(SP\),\(PV\),\(OP\)、P,I,Dパラメータ、PID調節計の種類(PI-D,I-PD) - 整定時間の決定
- P,I,Dパラメータおよび参照モデルの無駄時間の仮定
- PID調節計種類、整定時間及び無駄時間から参照モデルの時定数の決定
- P,I,Dパラメータ及び\(OP\)から\(\overline{SP}\)を計算
- \(\overline{SP}\)から参照モデルを使い\(\overline{PV}\)を計算
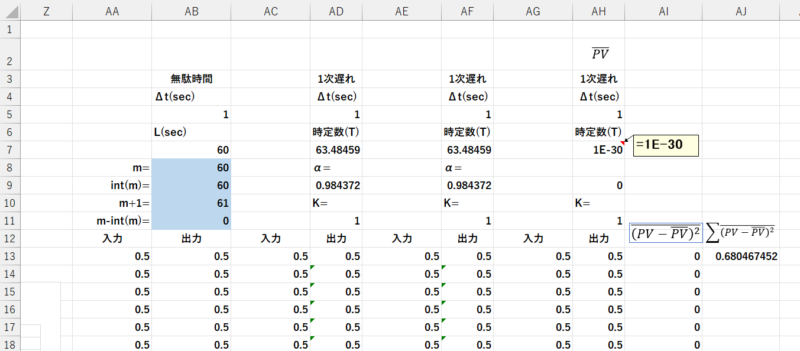
- \(\Sigma(PV-\overline{PV})^2\)を計算
- PIDパラメータ,\(\overline{PV}\),\(\overline{SP}\)から\(\overline{OP}\)を計算
- \(\Sigma(OP-\overline{OP})^2\)を計算
- \(J = \Sigma(PV – \overline{PV})^2 + \lambda f_s^2 \Sigma(OP – \overline{OP} )^2\)を計算
- \(J\)が十分小さければ最適P,I,Dパラメータ、十分小さくなければ3.に戻る
2.Excelでのチューニング
2-1.使用するExcelファイル
ここでは、”ExcelによるPID制御のチューニング(3)設定値変更データを用いる方法(3)“で作成したExcelファイルを使用します。
2-2.設定値変更データ
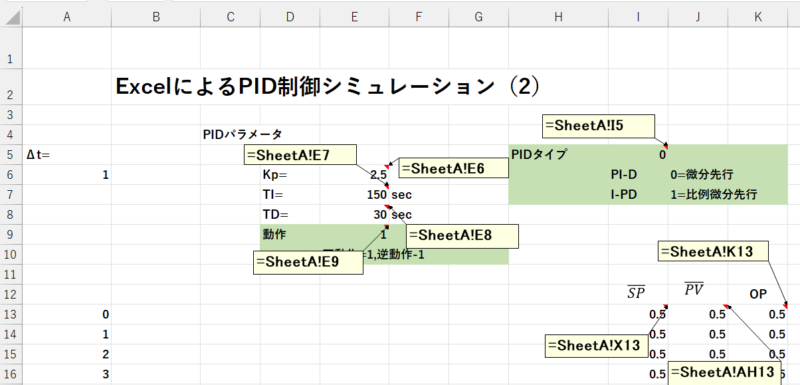
ここでは、”ExcelによるPID制御のシミュレーション(2)”で作成したExcelシート(定位型)を使用し、設定値変更データを作成します。(PIDタイプを0、すなわちPI-Dにします。)
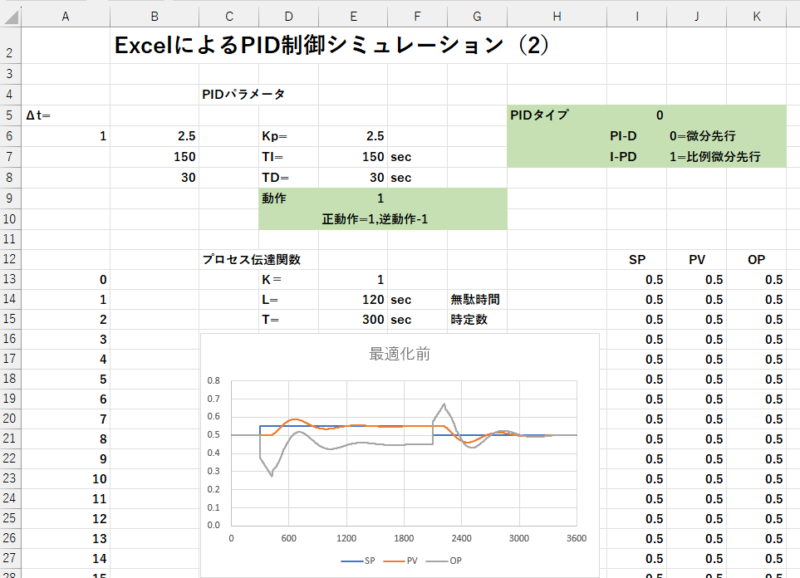
設定値は300秒から2100秒までが0.55でそれ以外は0.5です。
2-3.SheetAの変更(1)
SheetAの変更点は次の通りです。
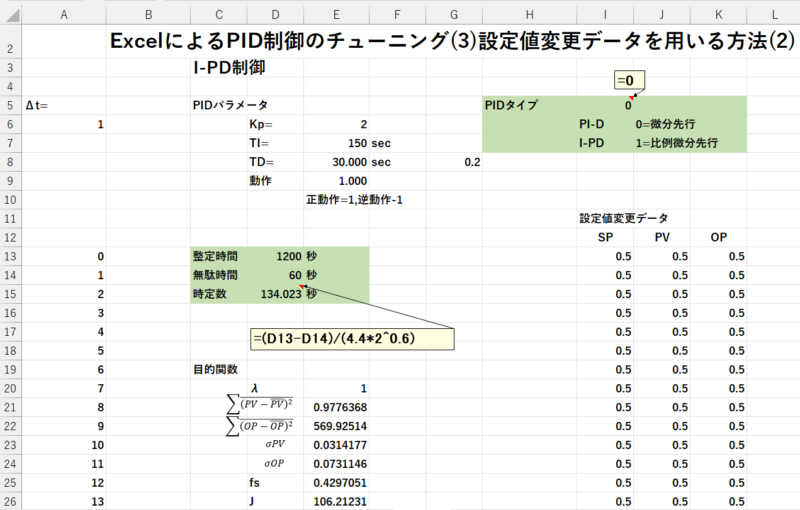
- I5 PI-D制御 = 0
- D15 整定時間、無駄時間から参照モデルの一次遅れの時定数を計算 =(D13-D14)/(4.4*2^0.6)
2-4.SheetAの変更(2)
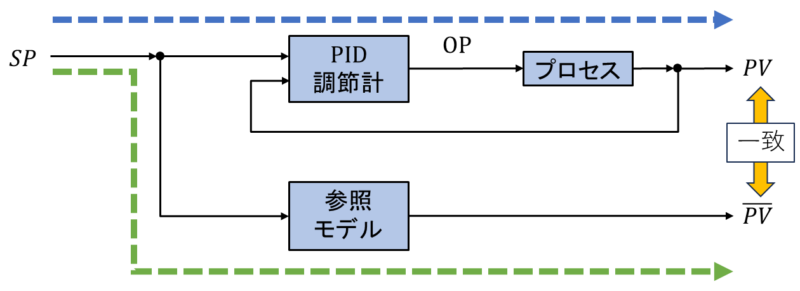
下記ブロック線図を参考に\(PV\),\(OP\)から\(\overline{SP}\)を計算します。
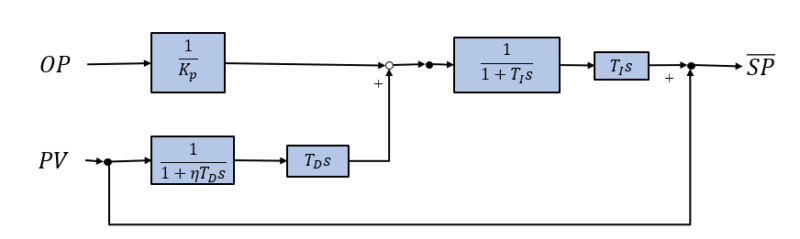
PI-D制御とI-PD制御では、計算式が違うので、M列からX列までをクリアーして、下記を入力します。
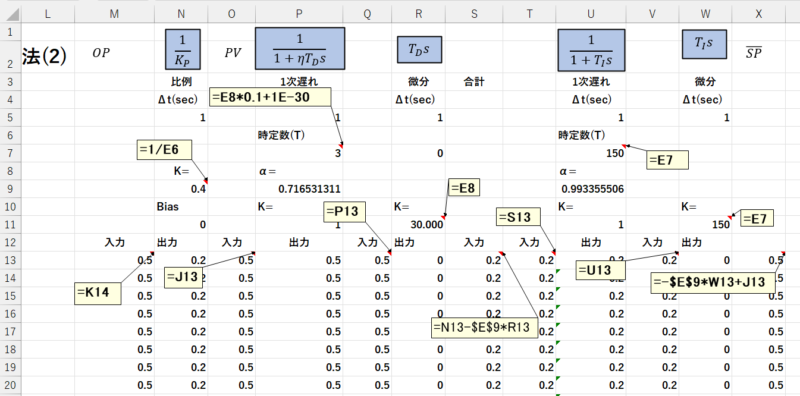
- M,N列
比例の伝達関数を貼り付け
ゲイン(N9) =1/E6
入力 (M13~) =K14~ - O,P列
1次遅れの伝達関数を貼り付け
時定数(P7) =E8*0.1+1E-30
入力 (O13~) =J13~ - Q,R列
微分の伝達関数を貼り付け
ゲイン(R11) =E8
入力 (Q13~) =P13~ - S列
二つの信号の合計を計算
入力 (S13~) =R13~ - T,U列
1次遅れの伝達関数を貼り付け
時定数(U7) =E7
入力 (T13~) =S13~ - V,W列
微分の伝達関数を貼り付け
ゲイン(W11) =E7
入力 (V13~) =U13~です。 - X列
\(\overline{SP}\)の計算
X13~ =-$E$9*W13+J13~
以上で\(\overline{SP}\)の計算は終了です。
2-5.SheetAの変更(3)
次に、参照モデルを使った\(\overline{SP}\)から\(\overline{PV}\)の計算のです。
PI-D制御では、参照モデルは2次遅れ(n=2)になり、時定数は下式より計算します。
\(\tau=\frac{T_{99}}{4.4n^{0.6}}\)
Excelシートでも2次遅れにする必要があります。ここでは、最後の1次遅れの時定数を0(1e-30)にして2次遅れにします。
以上でSheetAの変更は完了です。
2-6.SheetB変更(3)
次に、SheetBですが、変更する箇所はありません。
PIDタイプ(I5)が0(PI-D)になっていることを確認します。
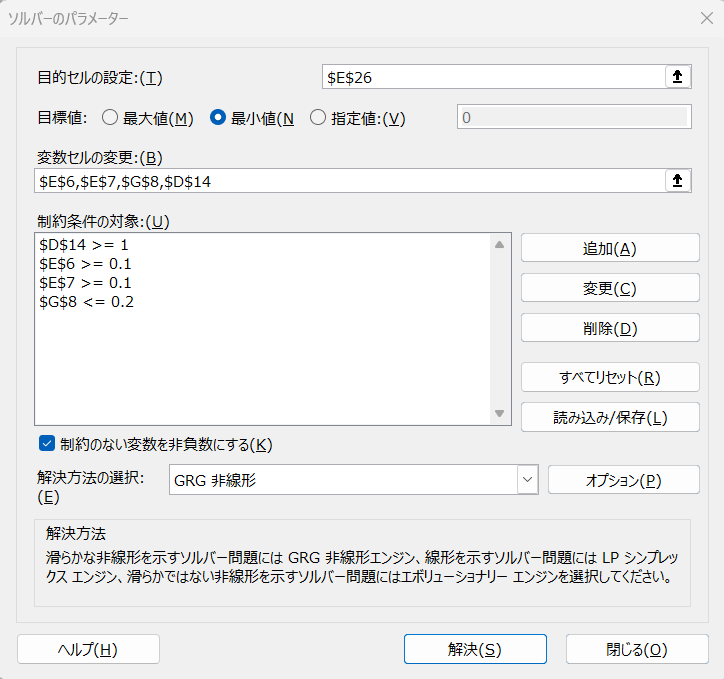
2-7.ソルバーの設定
ソルバーについても、変更箇所はありません。
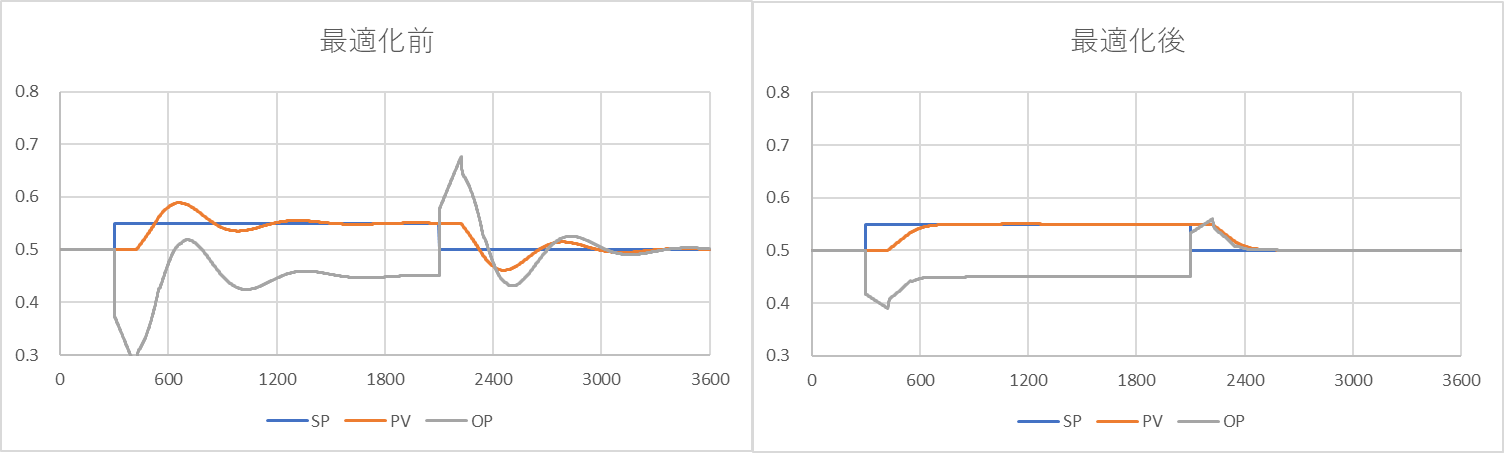
3.チューニングの実行
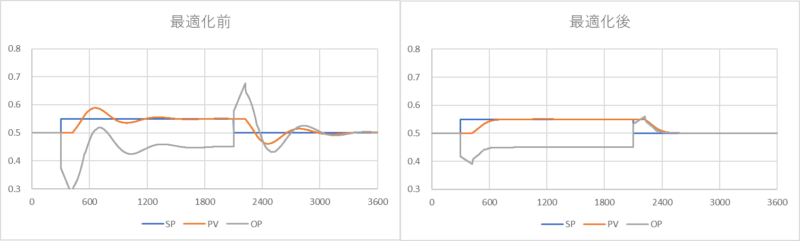
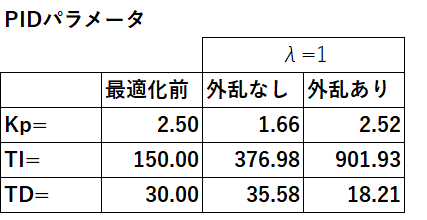
それでは実際にチューニングしてみます。
整定時間は600秒、λ=1で外乱なしです。
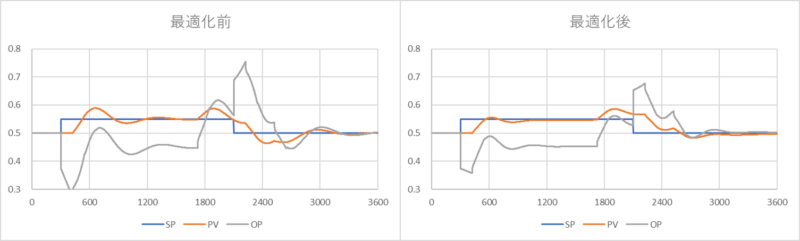
次は整定時間は600秒、λ=1で外乱あり(1500~2400秒 OP+0.1)です。
4.次回の予定
次回は、設定値変更データを用いた方法について、プロセス動特性、整定時間、微分動作の有無等についてシミュレーションした結果を紹介する予定です。