先に紹介した”ExcelによるPID制御のチューニング(2)参照モデルマッチング法(1)“では、プロセスの動特性がわかっている場合の参照モデルによるチューニングを紹介しました。
ここでは、設定値変更データ((\(SP\)),(\(PV\)),(\(OP\)))からのチューニング方法を紹介します。
1.設定値変更データを用いるチューニング法
前回の”ExcelによるPID制御のチューニング(2)参照モデルマッチング法(1)”は、プロセスの動特性がわかっている場合のチューニング方法です。
今回紹介する” ExcelによるPID制御のチューニング(3)設定値変更データを用いる方法“では、設定値変更時のデータからチューニングする方法です。プロセスの動特性がわかっていなくてもチューニングができる方法です。
この方法は、下記の資料の“E-FRIT法”を参考にしました。
加納,小河,田坂,高橋,滝波,吉井,大寶,増田:モデル不要PID調整法E-FRITの開発と実用化,計測と制御,50–12,1076/1079 (2011)
資料の方法では、PV値の参照モデルとの一致および出力値(OP)の変動の大きさの二つの点を評価してP,I,Dパラメータを最適化しています。
今回紹介するのは、PV値の参照モデルとの一致を評価してP,I,Dパラメータの最適化を行う方法です。
2.E-FRIT法における参照モデルへのマッチング方法
E-FRIT法における参照モデルへのマッチング方法を前回紹介した参照モデルマッチング法と比較して説明します。
2-1.参照モデルマッチング方法
参照モデルマッチング法では、プロセスの動特性がわかっているため任意のP,I,Dパラメータでの\(OP\),\(PV\)を計算することができます。
このため、PID制御の種類(PI-D,I-PD)および整定時間を決めると参照モデル(2または3次遅れ)が決まり、\(PV\)値と\(\overline{PV}\)が計算できます。
この\(PV\)値と\(\overline{PV}\)が一致する(差が最小となる)P,I,Dパラメータを求めることによりチューニングができるわけです。
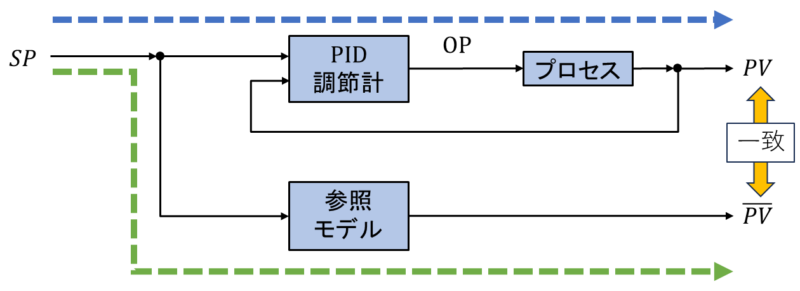
下のブロック線図で見ると\(SP\)を出発点として、上の青色のルート(PID調節計、プロセス)の出口(\(PV\))と下の緑色のルート(参照モデル)の出口(\(\overline{PV}\))が一致すれば、それが最適P,I,Dパラメータとなります。
2-2.E-FRIT法
E-FRIT法でも、PID制御の種類(PI-D,I-PD)および整定時間を与え、参照モデル(2または3次遅れ)を決めます。
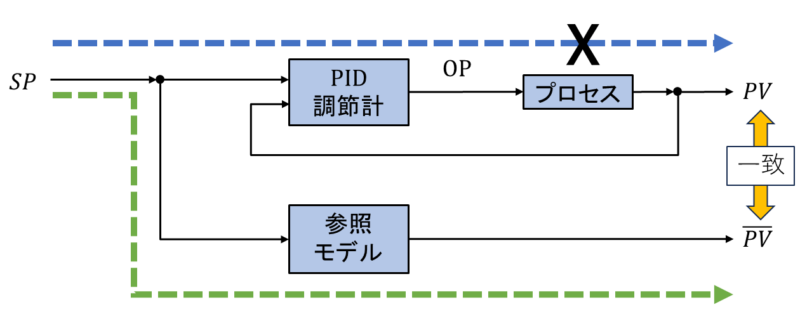
P,I,Dパラメータの最適化を行うには、P,I,Dパラメータを変える必要がありますが、\(SP\)がそのままではP,I,Dパラメータを変えると\(OP\)も変わります。
プロセスの動特性がわかっていないため、\(OP\)から\(PV\)を求めることはできません。
ブロック線図では見ると、上の青色のルートが途切れていることになります。
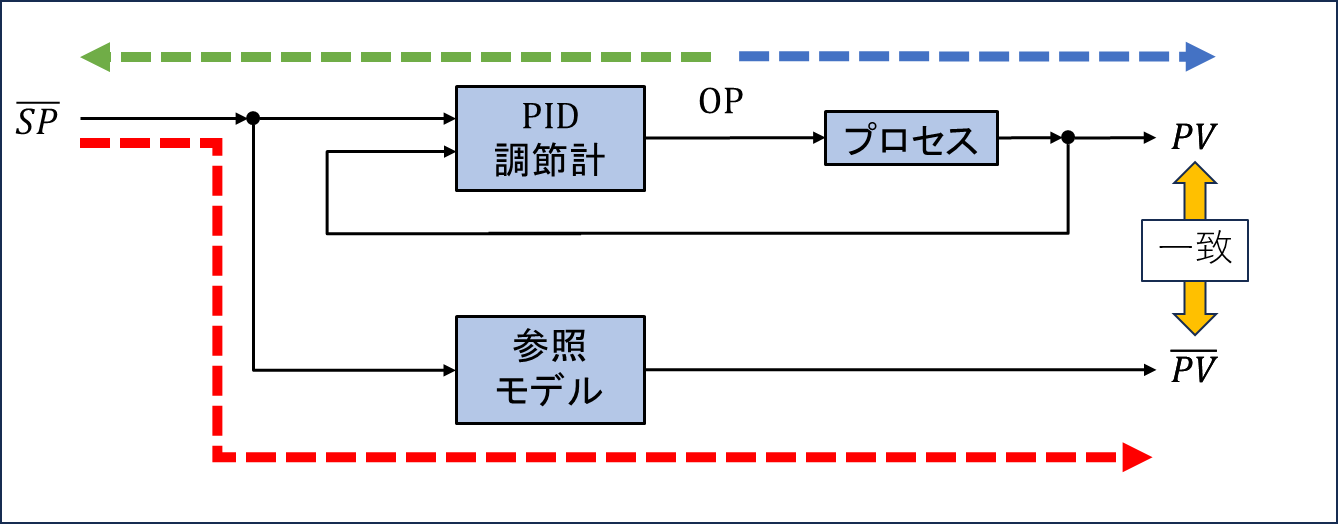
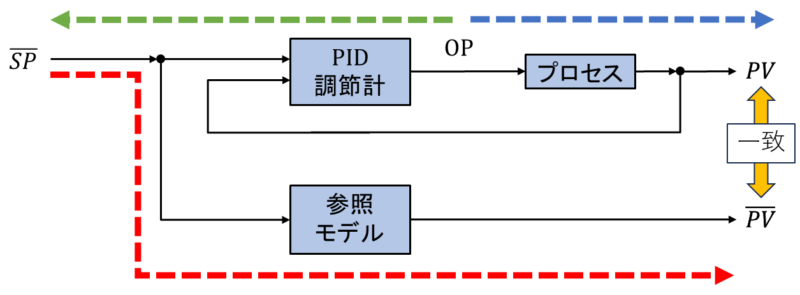
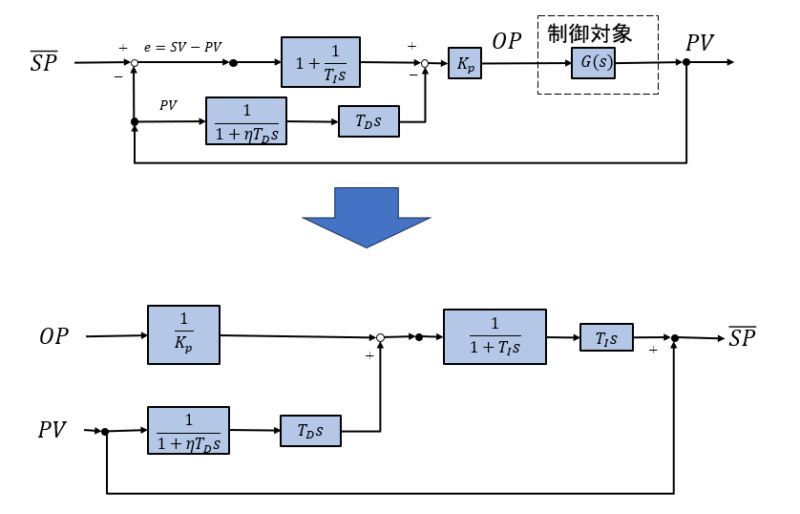
そこで、E-FRIT法では、最初の\(OP\)から緑色のルートのように逆に遡ります。
•\(OP\)からPID調節計を遡り新しい設定値\(\overline{SP}\)を求めます。
•次に、この新しい\(\overline{SP}\)を出発点として、下の赤色のルート(参照モデル)の出口\(\overline{PV}\)を求めます。
•上のルートでは、\(OP\)か変わらないので出口\(PV\)も最初の値(設定値変更データ)です。
•上のルートの出口\(PV\)と下のルート(参照モデル)の出口\(\overline{PV}\)が一致すれば、それが最適P,I,Dパラメータとなります。
3.チューニングの手順
チューニングの手順は次の通りになります。
- 設定値変更データの入手
\(SP\),\(PV\),\(OP\)、P,I,Dパラメータ、PID調節計の種類(PI-D,I-PD) - 整定時間の決定
- P,I,Dパラメータおよび参照モデルの無駄時間の仮定
- PID調節計種類、整定時間及び無駄時間から参照モデルの時定数の決定
- P,I,Dパラメータ及び\(OP\)から\(\overline{SP}\)を計算
- \(\overline{SP}\)から参照モデルを使い\(\overline{PV}\)を計算
- \(\Sigma(PV-\overline{PV})^2\)を計算
- \(\Sigma(PV-\overline{PV})^2\)が十分小さければ最適P,I,Dパラメータ、十分小さくなければ3.に戻る
4.設定値\(\overline{SP}\)の逆算
E-FRIT法では、設定値\(\overline{SP}\)を\(OP\)、\(PV\)から逆算する必要があります。
\(\overline{SP}\)の計算は、下記のようにブロック線図より求めることができます。
測定値微分先行PID制御(PI-D制御)
測定値比例微分先行PID制御(I-PD制御)

次回
次回(2025年2月)は、Excelでの計算の詳細及び計算例を紹介する予定です。